# 曲率
曲率(curvature)就是针对曲线上某个点的切线方向角对弧长的转动率,通过微分来定义,表明曲线偏离直线的程度。数学上表明曲线在某一点的弯曲程度的数值。

# 参数曲线的曲率公式
曲线的切线方向角:曲线在点 处的切线与 轴正向的夹角
适用于连续、可导的函数曲线
- 为弧长;
- , 分别为函数的一阶导数和二阶导数。
局限性:需要函数的解析表达式 (如), 但点云数据(如 3D 扫描得到的离散点)没有显式的函数形式,无法直接计算导数。
# 点云曲率计算
- 邻域协方差矩阵(Covariance Matrix),构建协方差矩阵.
- 特征值分解:计算协方差矩阵的特征值 和特征向量。
- 曲率定义:曲率。
协方差矩阵
- 协方差矩阵:描述点云局部几何特征,反映邻域点在法向方向上的离散程度。
- 协方差矩阵计算:计算邻域点坐标的均值,然后计算邻域点坐标减去均值后的协方差矩阵。
协方差矩阵:
- 为邻域点坐标;
- 为邻域点坐标的均值;
- 为邻域点的数量。
# 特征值分解
-
特征向量:代表邻域点分布的 “主方向”(即数据最分散的方向)。例如,若邻域点近似在一个平面上,特征向量会包括平面内的两个正交方向(主方向)和垂直于平面的方向。
-
特征值:代表邻域点在对应主方向上的 “离散程度”(可理解为 “伸展幅度”)。特征值越大,说明数据在该方向上越分散。
- 最小特征值:对应数据最 “紧凑” 的方向(离散程度最小);
- 最大特征值:对应数据最 “伸展” 的方向(离散程度最大)。
# 曲率定义
几何意义:
- 当邻域点近似分布在平面上时,(法向方向无离散),曲率;
- 当邻域点位于边缘或尖点时, 增大,曲率 较大。
实例:
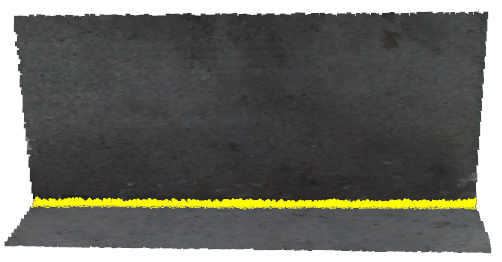
基于曲率计算 T 型面的焊点

"9i65wsa
import open3d as o3d | |
import numpy as np | |
weld_pcd = o3d.io.read_point_cloud("2.ply") # T 型平面点云数据 | |
pcd_tree = o3d.geometry.KDTreeFlann(weld_pcd) # 构建 KD 树 | |
curvatures = np.zeros(len(weld_pcd.points)) # 初始化曲率数组 | |
for i in range(len(weld_pcd.points)): | |
[k, idx, _] = pcd_tree.search_knn_vector_3d(weld_pcd.points[i], 20) # 搜索邻域点 | |
if k < 3: | |
continue | |
points = np.asarray(weld_pcd.points)[idx, :] # 获取邻域点坐标 | |
mean = np.mean(points, axis=0) # 计算邻域点均值 | |
points_centered = points - mean # 中心化 | |
cov = np.dot(points_centered.T, points_centered) / k # 计算协方差矩阵 | |
eigenvalues, eigenvectors = np.linalg.eigh(cov) # 计算特征值 | |
curvatures[i] = eigenvalues[0] / (eigenvalues.sum() + 1e-10) # 计算曲率 | |
threshold = np.percentile(curvatures, 98) # 计算曲率阈值 | |
is_weld_point = curvatures > threshold # 判断是否为焊点 | |
weld_points = np.asarray(weld_pcd.points)[is_weld_point] # 获取焊点坐标 | |
dot_radius = 0.001 # 圆点半径,根据实际场景调整 | |
dot_clouds = [] | |
for point in weld_points: | |
sphere = o3d.geometry.TriangleMesh.create_sphere(radius=dot_radius) # 创建球体 | |
sphere.translate(point) | |
sphere.paint_uniform_color([1, 1, 0]) # 黄色圆点,可调整颜色 | |
dot_clouds.append(sphere) | |
o3d.visualization.draw_geometries([weld_pcd]+dot_clouds) |
两种方法的联系
虽然公式形式不同,但两者的核心思想一致:曲率反映曲线 / 曲面的弯曲程度。
- 参数曲线公式通过导数直接计算切线方向的变化率;
- 点云方法通过邻域几何分析(协方差矩阵和特征值)间接估计弯曲程度。
# 其他点云曲率计算方法
- 拟合局部曲面:对邻域点拟合二次曲面(如抛物面),然后计算曲面的曲率。
- 法线变化率:通过相邻点的法线方向差异估计曲率。
- 高斯映射:将点云投影到单位球面上,分析投影点的分布密度。