Adman 梯度下降算法核心思想是,对于每个参数,根据其梯度的历史信息,动态调整其学习率从而实现更快的收敛和更好的性能。Adman 梯度下降算法使用两个参数,一个是动量参数,另一个是自适应学习率参数。
- 动量参数用于加速参数的更新
- 自适应学习率参数则根据参数梯度的历史信息,动态调整参数的学习率。
在学习 adam 梯度下降算法之前,有必要先了解一下梯度下降算法和动量梯度下降算法。
# 梯度下降算法
梯度下降算法(Gradient Descent, GD)是深度学习的核心之一,用于最小化目标函数。其基本思想是,在每次迭代中,沿着目标函数的负梯度方向更新参数,从而逐步逼近最优解。随机梯度下降算法(Stochastic Gradient Descent, SGD)是梯度下降算法的一种改进,它每次迭代只使用一部分样本进行计算,从而加快了训练速度。动量梯度下降算法(Momentum Gradient Descent, MGD)是梯度下降算法的另一种改进,它引入了动量参数,用于加速参数的更新。自适应学习AdaGrad算法、RMSProp算法训练过程中可以动态调整学习率,从而实现更快的收敛和更好的性能。Adam梯度下降算法(Adaptive Moment Estimation, Adam)是梯度下降算法的另一种改进,它结合了动量梯度下降算法和自适应学习率算法,是一种常用的优化算法。
在此之前,复习下损失函数。
# 损失函数
在深度学习中,网络参数的迭代更新由损失函数的梯度决定。梯度下降算法通过计算损失函数相对于参数的梯度,然后沿着梯度的负方向更新参数,从而逐步逼近最优解。
假设一个很简单的线性回归模型,输入为 x , 输出为 y ,模型参数为 w 和 b 。
其模型为:
损失函数为:
梯度下降算法的更新规则为:
其中, 为学习率, 和 分别为损失函数 L 对参数 w 和 b 的梯度。
其中, 为参数向量, 为损失函数 L 对参数 的梯度向量。
可以看出,每次更新参数时,都会乘以一个系数,如果 过大,可能会导致参数更新过大,从而错过最优解;如果 过小,可能会导致参数更新过慢,从而收敛速度过慢。因此,选择合适的学习率是非常重要的。
而且对于高维情况,普通梯度下降算法存在局限性
例如:
-
输入元素: 、
-
损失函数为:
-
梯度求偏导: 、:
-
更新参数:、
示例代码:
import numpy as np | |
import matplotlib.pyplot as plt | |
from matplotlib import cm | |
# 配置中文字体(可选) | |
plt.rcParams['font.sans-serif'] = ['SimHei'] | |
plt.rcParams['axes.unicode_minus'] = False | |
# 定义损失函数(示例使用二次函数) | |
def loss_function(x, y): | |
return x**2 + y**2 | |
# 计算梯度 | |
def compute_gradient(x, y): | |
dx = 2*x | |
dy = 2*y | |
return dx, dy | |
# 梯度下降参数设置 | |
lr = 0.1 # 学习率 | |
steps = 15 # 迭代次数 | |
start_point = (-4, 3.5) # 初始点 | |
# 生成网格数据 | |
x = np.linspace(-5, 5, 100) | |
y = np.linspace(-5, 5, 100) | |
X, Y = np.meshgrid(x, y) | |
Z = loss_function(X, Y) | |
# 执行梯度下降 | |
path = [start_point] | |
current_x, current_y = start_point | |
for _ in range(steps): | |
grad_x, grad_y = compute_gradient(current_x, current_y) | |
current_x -= lr * grad_x | |
current_y -= lr * grad_y | |
path.append((current_x, current_y)) | |
# 转换为数组便于绘图 | |
path = np.array(path) | |
x_path, y_path = path[:,0], path[:,1] | |
z_path = loss_function(x_path, y_path) | |
# 创建三维画布 | |
fig = plt.figure(figsize=(12, 8)) | |
ax = fig.add_subplot(111, projection='3d') | |
# 绘制损失函数曲面 | |
surf = ax.plot_surface(X, Y, Z, cmap=cm.coolwarm, | |
alpha=0.6, linewidth=0, | |
antialiased=False) | |
# 绘制梯度下降路径 | |
ax.plot(x_path, y_path, z_path, 'r-o', | |
markersize=8, linewidth=2, | |
markerfacecolor='yellow') | |
# 添加梯度箭头 | |
for i in range(len(path)-1): | |
dx = path[i+1,0] - path[i,0] | |
dy = path[i+1,1] - path[i,1] | |
dz = z_path[i+1] - z_path[i] | |
ax.quiver(path[i,0], path[i,1], z_path[i], | |
dx*0.8, dy*0.8, dz*0.8, | |
color='black', arrow_length_ratio=0.1) | |
# 添加标签和标题 | |
ax.set_xlabel('X 参数', labelpad=12) | |
ax.set_ylabel('Y 参数', labelpad=12) | |
ax.set_zlabel('损失值', labelpad=12) | |
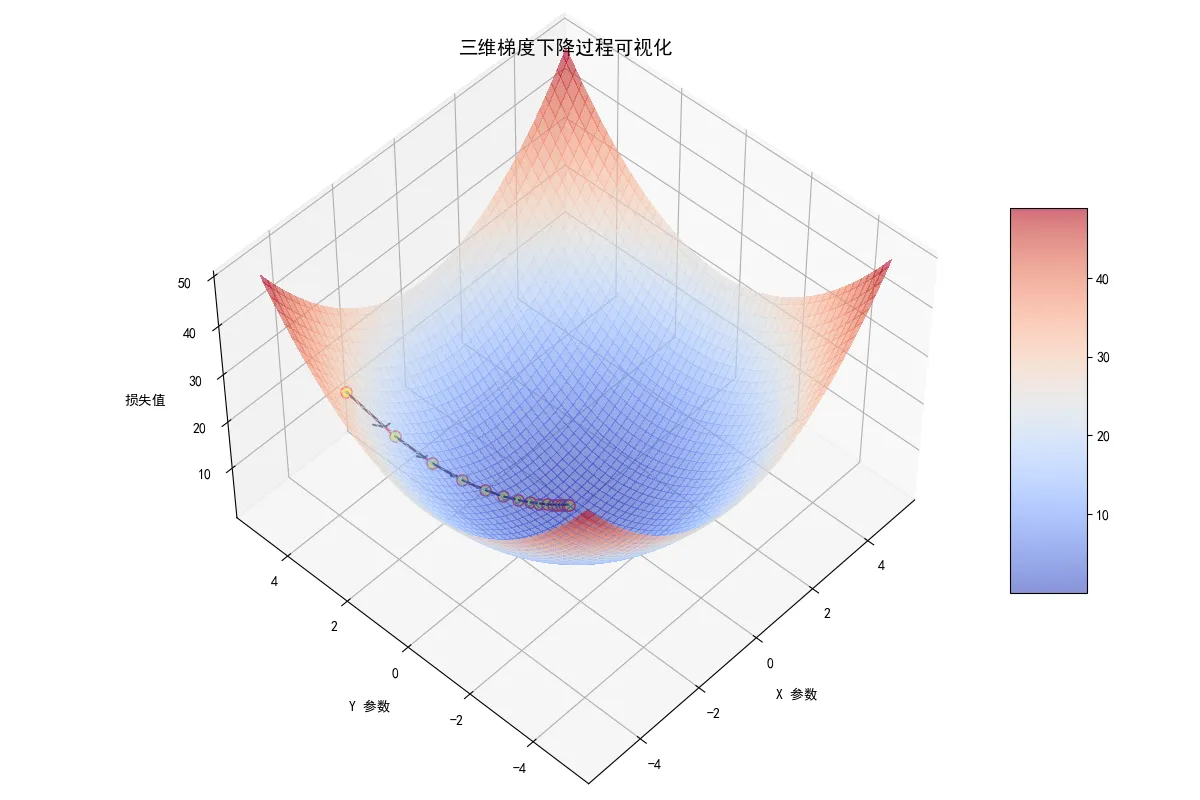
ax.set_title('三维梯度下降过程可视化', y=1.02, fontsize=14) | |
# 设置观察角度 | |
ax.view_init(elev=30, azim=-140) | |
# 显示颜色标尺 | |
fig.colorbar(surf, shrink=0.5, aspect=5) | |
# 显示图形 | |
plt.tight_layout() | |
plt.show() |
可视化结果:
缺点:
- 梯度下降算法在训练过程中可能会陷入局部最小值,导致模型无法收敛到全局最优解。
- 梯度下降算法的学习率需要手动调整,如果学习率过大,可能会导致模型在最优解附近震荡,如果学习率过小,可能会导致模型收敛速度过慢。
# 动量梯度下降算法
不同于上面的梯度下降算法,动量梯度下降算法引入了历史梯度信息 (可以理解为保留上次梯度更新方向的一定力) 。
公式为:
为历史梯度信息的保留量, 为动量参数,取值范围为 0 到 1 之间,通常取 0.9。 为学习率, 为损失函数 L 对参数 的梯度向量。
参数更新变为:
为参数向量。
优点:
- 动量梯度下降算法可以加速参数的更新,减少训练时间。
- 动量梯度下降算法可以避免局部最小值,提高模型的收敛速度。
缺点:
- 动量梯度下降算法需要手动调整
动量参数和学习率,如果参数设置不当,可能会导致模型收敛速度过慢或者震荡。
# 学习率
学习率是梯度下降算法中最重要的参数之一,它决定了参数更新的步长。如果学习率过大,可能会导致模型在最优解附近震荡,如果学习率过小,可能会导致模型收敛速度过慢。因此,选择合适的学习率是非常重要的。
- 引入变量 (AdaGrad 算法 2011)
重点:
- $r$是一个变量,其值随着迭代不断增大,导致学习率下降。
- $r$每次增加的量由计算的梯度值$\nabla L(\theta)$决定。
参数更新:
为防止除 0 操作,通常取一个很小的值,如。
这样当梯度变化较大时,$r$增加的多,学习率减小的快,当梯度变化较小时,$r$增加的少,学习减小的慢。
问题: AdaGrad 算法 值只与梯度有关,可能导致学习率过早的变小。
- 引入变量 (RMSProp 算法 2012)
其中: 为手动调节参数。
# Adam 梯度下降算法 (2014)
Adam 梯度下降算法结合了动量梯度下降算法和自适应学习率算法,是一种常用的优化算法。
自适应动量:
是动量参数。
是自适应学习率参数。
修正动量和学习率:
为迭代次数,修正后使得在训练之初,动量和学习率比较大,帮助快速收敛。
参数更新: